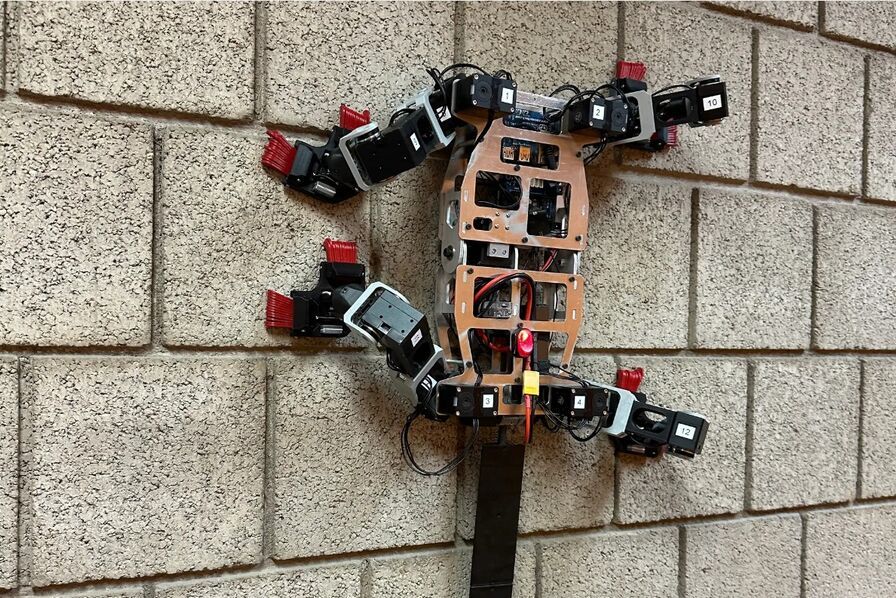
You think that a smooth wall is impossible to climb… But the Loris, acronym for Lightweight Observation Robot for Irregular Slopes (Light observation robot for irregular slopes), defies the laws of gravity. This bio-inspired quadruped robot has four claws at the end of its legs. And the most interesting thing is that these kinds of claws are covered with micro-spines capable of embedding themselves in the smallest asperities of the rock, in order to ensure its adhesion.
This process differs from the traditional approach. In general, researchers favor the use of suction cups for 90-degree robotic climbs. But this technique does not work on irregular or porous surfaces like stone walls or rock cliffs. At home, you have probably already tried to hang a rubber suction cup to use as a suspension. If the surface is not smooth, you have also seen it fall, taking with it the hanging cloth or napkin. Robots equipped with suction cups also face this problem and the few prototypes tested were too slow or bulky.
Four legs is good, six is better!
Researchers from Carnegie Mellon University and NASA ensure that their robot is light and easy to assemble. To know where he should hold on and how to move forward, Loris uses a depth camera to analyze the wall and correctly place one leg at a time. The other three clamps are used to maintain adhesion to the surface. But the Casanova of the walls is not close to conquering them all. Those that are too smooth, made of concrete blocks for example, still resist it. And if a single plier misses its grip, you will fall. A problem easily overcome by going from four legs to six, so that five limbs permanently ensure grip. Loris still has obstacles to climb before considering tackling the mountains of Mars or the craters of the Moon.
Selected for you




{kind=link}
{kind=link}