Scientists in South Korea have built micro-robots working in groups, inspired directly by ants. They made them carry out several complex tasks.
South Korean scientists have developed cuboidal magnetic microrobots working in swarms, like ants. They can grab and carry objects several times their size. The results were published on December 18, 2024 in the journal Cell Press Device.
Researchers, a release explains, are increasingly drawing inspiration from how ants work collectively to achieve goals, e.g. to fill a gap on a path or group together in a raft to survive floods.” They also noticed that, like ants, they face fewer failures when they work in groups. “Even if some members of the group do not reach the goal, the others continue to execute their programmed movements until enough of them do.”lit.
Complex tasks to carry out
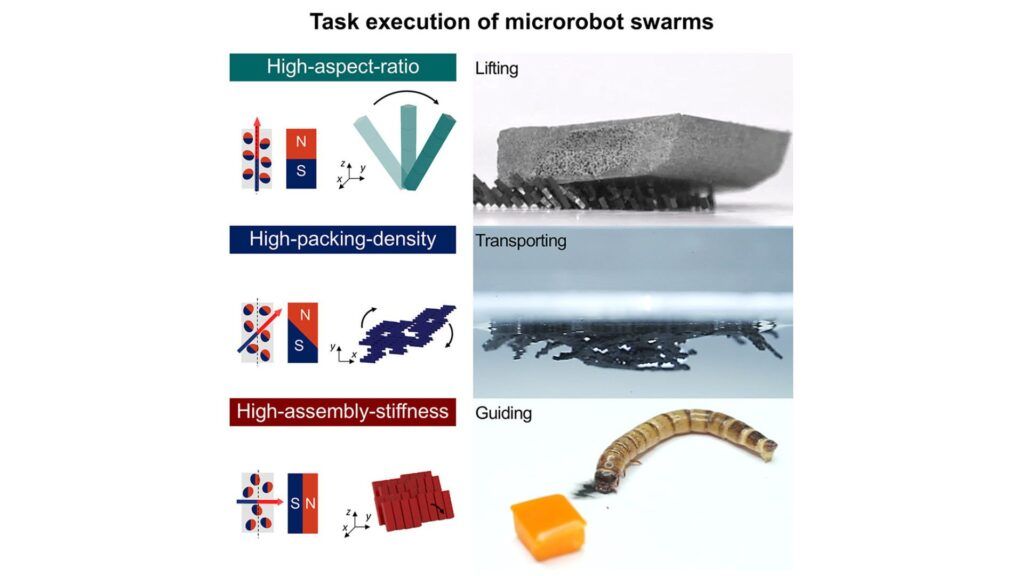
Author Jeong Jae Wie from the Department of Organic and Nano Engineering at Hanyang University in Seoul and his colleagues tested different configurations of the micro-robot group to carry out a task.
Associated in a different way for each task experienced, the robots successfully completed several complicated exercises. They were thus able to:
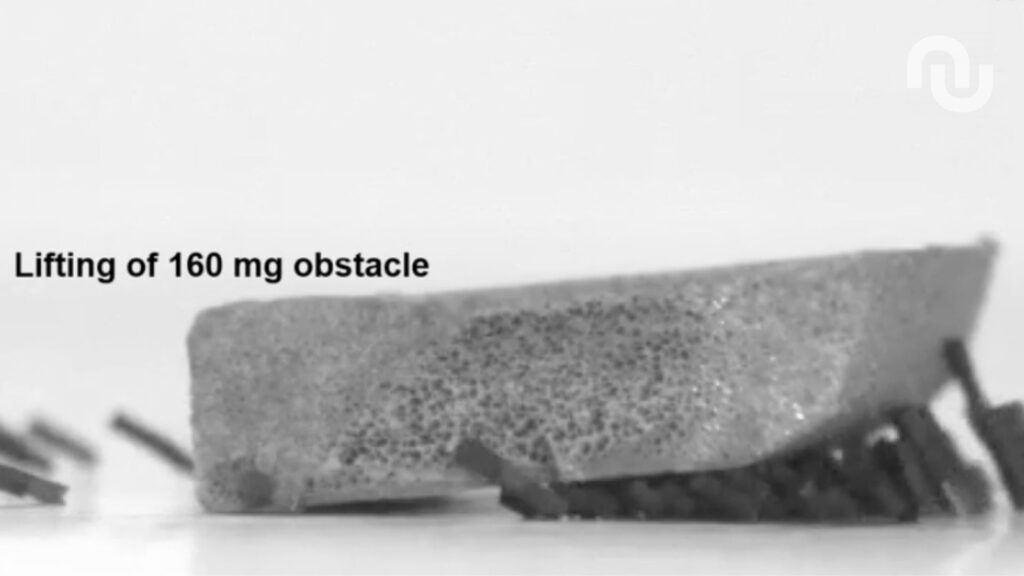
- climb an object 5 times higher than their own height,
- throw yourself over an obstacle,
- transport merchandise weighing 350 times their individual weight,
- guide the movements of small organisms.
A group of 1,000 micro-robots even managed to coat a pill 2,000 times the weight of an individual robot, then form a floating raft on water to transport it on top of the liquid. Finally, a last group managed to uncork a tube.
What future applications for micro-robots?
In the future, such assemblies would make it possible to develop technologies to carry out more complex tasks in more restrictive environments. Tasks in environments that are, today, too difficult to carry out for a robot alone. This would involve, for example, unblocking an artery.
Jeong Jae Wie concludes: “Although the study results are promising, the swarms de micro-robots Magnetic devices will need higher levels of autonomy before they are ready for real-world applications. They required external magnetic control and are unable to move autonomously in complex or confined spaces like real arteries. Future research will focus on improving their level of autonomy, such as real-time control of their movements and trajectories. »
Understanding matter and the Universe with physics



